Visual-Inertial Navigation Systems: An Introduction Patrick Geneva 1:00:19 1 year ago 9 208 Далее Скачать
Multi-State Constraint Kalman Filter based Stereo Visual-Inertial Odometry Nesl Snu 1:47 3 years ago 208 Далее Скачать
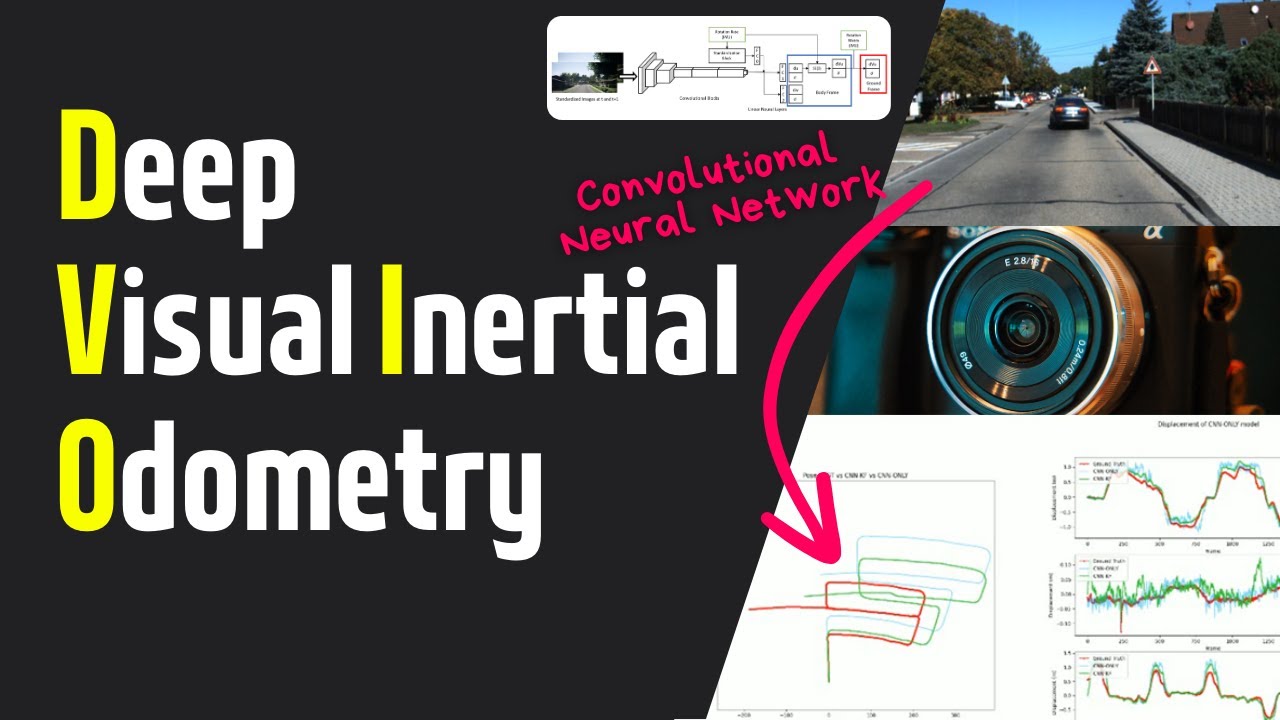
Towards End to end Learning of Visual Inertial Odometry with an EKF trailab 10:00 2 years ago 1 580 Далее Скачать
Extended Kalman Filter Fusion of Visual-Inertial Data Embedded and Multisensor Systems Research Group 0:41 4 years ago 189 Далее Скачать
Map-Based Visual-Inertial Monocular SLAM using Inertial assisted Kalman Filter Quan Meixiang 2:09 7 years ago 348 Далее Скачать
Learned Inertial Odometry for Autonomous Drone Racing (RAL 2023 narrated) UZH Robotics and Perception Group 3:42 1 year ago 5 585 Далее Скачать
Keyframe-based sliding window filter for visual inertial odometry with full self-calibration Jianzhu Huai 3:45 2 years ago 174 Далее Скачать
RNIN-VIO: Robust neural inertial navigation aided visual inertial odometry in challenging scenes danpeng chen 3:41 3 years ago 457 Далее Скачать
IMU and Monocular Visual odometry Fusion with Unscented Kalman Filter. No One 5:24 6 years ago 267 Далее Скачать
Robust Stereo Visual Inertial Odometry for Fast Autonomous Flight ICRA 2018 0:29 6 years ago 291 Далее Скачать
Cubature Kalman Filter for Visual Inertial Navigation System Trung Nguyen 5:01 7 years ago 797 Далее Скачать
Invariant Cubature Kalman Filtering on Lie Group SE(3) for Monocular Visual Inertial Odometry Trung Nguyen 4:01 6 years ago 238 Далее Скачать
Monocular Visual-Inertial Odometry with Planar Regularities - Pitch Video Robot Perception and Navigation Group 5:59 1 year ago 675 Далее Скачать
Deep IMU Bias Inference for Robust Visual-Inertial Odometry With Factor Graphs Oxford Dynamic Robot Systems Group 3:01 1 year ago 852 Далее Скачать
Teaser: Monocular Visual-Inertial Depth Estimation (ICRA'23) Embodied AI Lab 2:20 1 year ago 576 Далее Скачать